1 Introduction Stepper motors use microstep drive technology. In addition to improving the resolution of the motor, it is important to improve the uniformity of rotation. Conventional stepper motor systems have a significant step feel at low speeds. Dividing a whole step into many small steps, the uniformity of rotation naturally needs to be improved. However, what is the characteristic of the angular velocity stability of the stepper motor system driven by the microstep, what is the relationship with the number of subdivisions, and what level of angular velocity stability can be achieved. It is also necessary to find out a series of problems, such as the influence and restrictions of which factors. The micro-step drive technology of the stepper motor is correctly adopted by the designer of the application system, and is also required by the design and manufacturer to understand and master. For the sake of clarity and the concept of quantity, an example of a microstep drive system is given. 2 Frequency domain division and angular velocity fluctuation characteristics The average speed of the stepping motor is proportional to the control pulse frequency (f cp ), and inversely proportional to the number of logic energization states (M) and the number of rotor teeth (Z r ), ie the average speed:  Or average angular velocity:
Or average angular velocity:  Where m is the number of logical energization states of the whole step mode, usually equal to the number of phases n1 - the number of microsteps included in the whole step, that is, the subdivision number of the stepper motor is running, according to the characteristics of its motion form, the entire frequency can be The domain is divided into several frequency bands. The typical division is to divide the entire frequency domain into extremely low frequency, low frequency and high frequency. 2.1 very low frequency
Where m is the number of logical energization states of the whole step mode, usually equal to the number of phases n1 - the number of microsteps included in the whole step, that is, the subdivision number of the stepper motor is running, according to the characteristics of its motion form, the entire frequency can be The domain is divided into several frequency bands. The typical division is to divide the entire frequency domain into extremely low frequency, low frequency and high frequency. 2.1 very low frequency  That is, the period or interval of the control pulse is greater than the frequency domain of the stop time (ts). Each step of the motor is a one-step response process, and the motor oscillates at its natural frequency to attenuate to a standstill. According to equation (2), the average angular velocity of the motor is small, but the maximum angular velocity can reach a considerable value during free oscillation. In fact, the value of the maximum angular velocity without attenuating during the free oscillation process is:
That is, the period or interval of the control pulse is greater than the frequency domain of the stop time (ts). Each step of the motor is a one-step response process, and the motor oscillates at its natural frequency to attenuate to a standstill. According to equation (2), the average angular velocity of the motor is small, but the maximum angular velocity can reach a considerable value during free oscillation. In fact, the value of the maximum angular velocity without attenuating during the free oscillation process is:  It can be seen that the angular velocity of the motor fluctuates greatly in this frequency domain, varying between its positive maximum value and negative maximum value. 2.2 low frequency
It can be seen that the angular velocity of the motor fluctuates greatly in this frequency domain, varying between its positive maximum value and negative maximum value. 2.2 low frequency  In this frequency band, the interval of the control pulses is smaller than the stop time, and the single-step angular velocity oscillation cannot be attenuated to zero. However, the interval between control pulses is longer than that of the free oscillation period, so there is generally overshoot or overshoot. When the motor is started in this frequency band, the initial conditions of the second step are complicated, and under unfavorable conditions, significant oscillations may occur, including f cp = f 0 (6), which is a so-called low-frequency resonance point. 2.3 high frequency
In this frequency band, the interval of the control pulses is smaller than the stop time, and the single-step angular velocity oscillation cannot be attenuated to zero. However, the interval between control pulses is longer than that of the free oscillation period, so there is generally overshoot or overshoot. When the motor is started in this frequency band, the initial conditions of the second step are complicated, and under unfavorable conditions, significant oscillations may occur, including f cp = f 0 (6), which is a so-called low-frequency resonance point. 2.3 high frequency  In this frequency band, the period of the control pulse is less than 1/4 of the free oscillation period, so when the motor starts in this frequency band, the angular displacement of the first step must not exceed a step angle, that is, a dynamic error of hysteresis is generated. When the motor is running continuously in steady state, there is no stepping feeling. Then f cp = f 0 (8) is used as the stepping motor to enter the boundary line of the high frequency operation frequency domain. That is, the stepping motor enters the boundary of the relatively continuous smooth running domain. The average angular velocity of the motor determined by this frequency is:
In this frequency band, the period of the control pulse is less than 1/4 of the free oscillation period, so when the motor starts in this frequency band, the angular displacement of the first step must not exceed a step angle, that is, a dynamic error of hysteresis is generated. When the motor is running continuously in steady state, there is no stepping feeling. Then f cp = f 0 (8) is used as the stepping motor to enter the boundary line of the high frequency operation frequency domain. That is, the stepping motor enters the boundary of the relatively continuous smooth running domain. The average angular velocity of the motor determined by this frequency is:  Take a typical four-phase hybrid stepping motor as an example, its phase number, m=4, the number of rotor teeth z r =50, such as the natural frequency f 0 =100Hz, running in the normal full-step mode, substituting ( 9) Get:
Take a typical four-phase hybrid stepping motor as an example, its phase number, m=4, the number of rotor teeth z r =50, such as the natural frequency f 0 =100Hz, running in the normal full-step mode, substituting ( 9) Get:  That is to say, this typical stepping motor system only enters the continuous smooth running zone when the speed is higher than 120r/min. In order to make this motor run smoothly at the 100r/min or lower speed, microstep drive technology is required. The larger the subdivision number, the lower the average speed of continuous smooth operation according to equation (9). If the above motor takes the subdivision number n1=1024, then:
That is to say, this typical stepping motor system only enters the continuous smooth running zone when the speed is higher than 120r/min. In order to make this motor run smoothly at the 100r/min or lower speed, microstep drive technology is required. The larger the subdivision number, the lower the average speed of continuous smooth operation according to equation (9). If the above motor takes the subdivision number n1=1024, then:  That is, the speed is reduced to 8.5min, and lr is still a continuous smooth running domain. In addition, even in the extremely low frequency discontinuous operation domain, the angular velocity fluctuation is significantly reduced as the number of subdivisions increases, and the limit value of the angular velocity fluctuation is represented by the equation (4), which is proportional to the step angle. Or it is inversely proportional to the number of subdivisions. 3 Experimental Research The experimental device is a set of angular velocity testing system, and its block diagram is shown in Figure 1.
That is, the speed is reduced to 8.5min, and lr is still a continuous smooth running domain. In addition, even in the extremely low frequency discontinuous operation domain, the angular velocity fluctuation is significantly reduced as the number of subdivisions increases, and the limit value of the angular velocity fluctuation is represented by the equation (4), which is proportional to the step angle. Or it is inversely proportional to the number of subdivisions. 3 Experimental Research The experimental device is a set of angular velocity testing system, and its block diagram is shown in Figure 1. 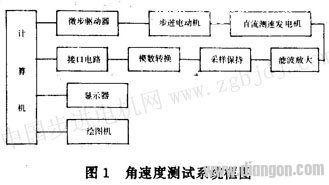 The motor under test was developed by Hahang Electric Servo Technology Research Institute and used in the micro-step drive system. The motor is a 68BYG2102 two-phase hybrid stepping motor. The basic technical data, the rotor teeth Zr = 102, the phase winding resistance R = 50Ω, the stationary phase current of I = 0.3A, the holding torque T k ≥0.6Nm. The driver is also a two-phase motor microstep driver developed by Hahang. The subdivision number is variable, nl=1, 2, 4, ..., 526, 1024. Figure 2 shows the test results of a set of angular velocity waveforms. The average angular velocity of the motor is kept constant during the test. The n1 microstep is taken for 250ms, that is, 0.25s is taken one full step or 1/4 pitch, and the average angular velocity is:
The motor under test was developed by Hahang Electric Servo Technology Research Institute and used in the micro-step drive system. The motor is a 68BYG2102 two-phase hybrid stepping motor. The basic technical data, the rotor teeth Zr = 102, the phase winding resistance R = 50Ω, the stationary phase current of I = 0.3A, the holding torque T k ≥0.6Nm. The driver is also a two-phase motor microstep driver developed by Hahang. The subdivision number is variable, nl=1, 2, 4, ..., 526, 1024. Figure 2 shows the test results of a set of angular velocity waveforms. The average angular velocity of the motor is kept constant during the test. The n1 microstep is taken for 250ms, that is, 0.25s is taken one full step or 1/4 pitch, and the average angular velocity is:  Figure 2a is an example of an angular velocity waveform at very low frequencies. It can be seen from the figure that the period of free angular oscillation is about T 0 = 5ms, so its natural frequency is:
Figure 2a is an example of an angular velocity waveform at very low frequencies. It can be seen from the figure that the period of free angular oscillation is about T 0 = 5ms, so its natural frequency is:  The curve shows that the stop time of the free oscillation is approximately Ts = 40 ms. Figure la corresponds to nl=4, f cp =4nl=16.
The curve shows that the stop time of the free oscillation is approximately Ts = 40 ms. Figure la corresponds to nl=4, f cp =4nl=16.  It belongs to the extreme frequency domain. The maximum angular velocity can be seen on the curve:
It belongs to the extreme frequency domain. The maximum angular velocity can be seen on the curve:  =56 rad/s (electrical angle) = 549 rad/s is about 9 times the average angular velocity. Figure 2b corresponds to nl = 32, f cp = 128 pulses / s, belonging to the low frequency frequency domain. The angular velocity does not decay to rest, but there are still significant oscillation characteristics. 2c and 2d correspond to nl=256, f cp =1 024 pulses/s and nl=1 024, respectively, f cp = 4 096 pulses/s, both of which belong to the high frequency frequency domain. The motor enters the continuous smooth running domain and there is no free-running fluctuation in the angular velocity waveform. It should be noted that the small fluctuations shown by the curves in the figure are caused by the imperfection of the test system, which has obvious characteristics of power frequency interference. Excluding these power frequency interference signals, it can be seen that the angular velocity also has some fluctuations, and changes about one cycle in a whole step range, that is, the characteristic period of a pitch is a fourth harmonic. At this time, the absolute value of the angular velocity fluctuation is very small, in the example shown:
=56 rad/s (electrical angle) = 549 rad/s is about 9 times the average angular velocity. Figure 2b corresponds to nl = 32, f cp = 128 pulses / s, belonging to the low frequency frequency domain. The angular velocity does not decay to rest, but there are still significant oscillation characteristics. 2c and 2d correspond to nl=256, f cp =1 024 pulses/s and nl=1 024, respectively, f cp = 4 096 pulses/s, both of which belong to the high frequency frequency domain. The motor enters the continuous smooth running domain and there is no free-running fluctuation in the angular velocity waveform. It should be noted that the small fluctuations shown by the curves in the figure are caused by the imperfection of the test system, which has obvious characteristics of power frequency interference. Excluding these power frequency interference signals, it can be seen that the angular velocity also has some fluctuations, and changes about one cycle in a whole step range, that is, the characteristic period of a pitch is a fourth harmonic. At this time, the absolute value of the angular velocity fluctuation is very small, in the example shown:  ≈7.5 rad/s (electrical angle)-O. 073 5rad/s
≈7.5 rad/s (electrical angle)-O. 073 5rad/s  ≈ 5.5 rad/s (electrical angle) = 0.053 9 rad/s The curves of Figures 2c and 2d are compared, almost identical. It can be seen that for a certain average angular velocity, once the subdivision number is increased and the cp pulse is increased to the high frequency frequency domain, the angular velocity of the motor tends to be stable. When the subdivision number is further increased, the angular velocity fluctuation will not be further reduced, that is, excessively increasing the subdivision number does not help to improve the angular velocity stability. From the above results, we can get a little inference. For the running domain with high angular velocity, the whole step method is in the high frequency frequency domain. The microstep drive will not have any effect on improving the angular velocity stability.
≈ 5.5 rad/s (electrical angle) = 0.053 9 rad/s The curves of Figures 2c and 2d are compared, almost identical. It can be seen that for a certain average angular velocity, once the subdivision number is increased and the cp pulse is increased to the high frequency frequency domain, the angular velocity of the motor tends to be stable. When the subdivision number is further increased, the angular velocity fluctuation will not be further reduced, that is, excessively increasing the subdivision number does not help to improve the angular velocity stability. From the above results, we can get a little inference. For the running domain with high angular velocity, the whole step method is in the high frequency frequency domain. The microstep drive will not have any effect on improving the angular velocity stability. 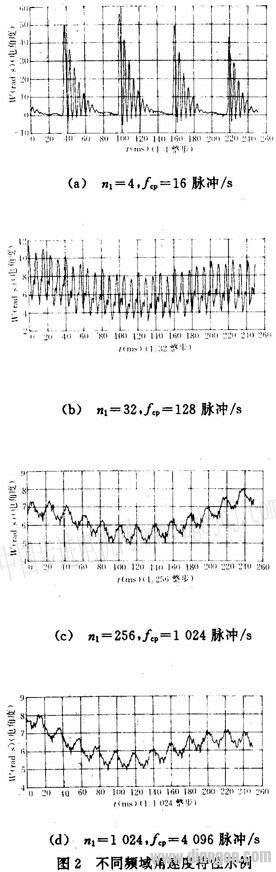 The experimental curve of Figure 3 can show this conclusion. Figure 3b corresponds to n1 = l 024, which is much larger than the number of subdivisions in Figure 3a. From the vibrational characteristics, the peak-to-peak value of angular velocity fluctuations at low speeds, for example, f < 40k pulses/s (
The experimental curve of Figure 3 can show this conclusion. Figure 3b corresponds to n1 = l 024, which is much larger than the number of subdivisions in Figure 3a. From the vibrational characteristics, the peak-to-peak value of angular velocity fluctuations at low speeds, for example, f < 40k pulses/s (  ) Significantly reduced. In the higher speed range, the value of the angular velocity fluctuation hardly changes. Micro-step drive technology can significantly improve the smoothness of stepper motor operation at low speed.
) Significantly reduced. In the higher speed range, the value of the angular velocity fluctuation hardly changes. Micro-step drive technology can significantly improve the smoothness of stepper motor operation at low speed. 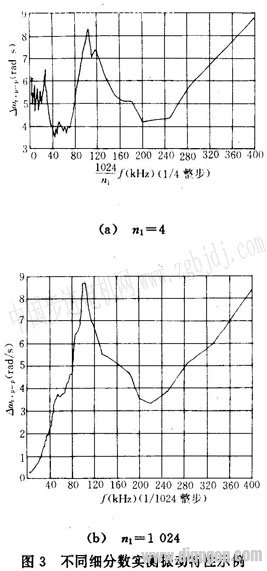 Figure 2c or b shows that the microstep drive motor angular velocity is characterized by a fourth harmonic, that is, alternating four cycles in one pitch range. However, there are many steps in a range of pitches, for example, when n 1 = l 024, a pitch of 4,096 steps is required. It can be seen that for the walking pulse, the fluctuation of the angular velocity is gradually changed. In the range of one step, the angular velocity can be considered to be constant, which can be approximated as a quasi-steady state operation, which can be written as:
Figure 2c or b shows that the microstep drive motor angular velocity is characterized by a fourth harmonic, that is, alternating four cycles in one pitch range. However, there are many steps in a range of pitches, for example, when n 1 = l 024, a pitch of 4,096 steps is required. It can be seen that for the walking pulse, the fluctuation of the angular velocity is gradually changed. In the range of one step, the angular velocity can be considered to be constant, which can be approximated as a quasi-steady state operation, which can be written as:  The above equation shows that when f cp is constant, the angular velocity fluctuation is caused by the variation of the step angle, that is, the step angle error. Conversely, fluctuations in angular velocity reflect changes in the step angle. Take the measured angular velocity curve shown in Figure 4 as an example. The maximum angular velocity available from the graph is approximately
The above equation shows that when f cp is constant, the angular velocity fluctuation is caused by the variation of the step angle, that is, the step angle error. Conversely, fluctuations in angular velocity reflect changes in the step angle. Take the measured angular velocity curve shown in Figure 4 as an example. The maximum angular velocity available from the graph is approximately  =0.20 rad/s, the minimum value is approximately
=0.20 rad/s, the minimum value is approximately  =O. 13 rad/s. Correspondingly, the maximum and minimum values ​​of the step angle are:
=O. 13 rad/s. Correspondingly, the maximum and minimum values ​​of the step angle are: 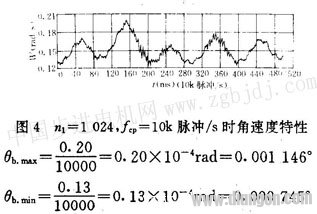 Average of the step angle:
Average of the step angle:  =0.15×10 -4 =0.000 862 o So the microstep angle error is:
=0.15×10 -4 =0.000 862 o So the microstep angle error is:  =+O. 000 278 o and -0.000 117 o This is basically consistent with the results obtained by the micro step angle test. 4 conclusions a. The microstep drive can significantly improve the stability of the angular velocity of the stepping motor in the low speed running zone. There is no significant effect on the stability of the angular velocity of the high speed running domain. b. The uniformity of the low-speed operation of the microstepping drive system is mainly determined by the uniformity of the microstep angle. For a four-phase (two-phase) motor, it is important to reduce the influence of the fourth harmonic torque. c. A new method for determining the micro-step angle variation law and the micro-step angle error using the angular velocity curve is given.
=+O. 000 278 o and -0.000 117 o This is basically consistent with the results obtained by the micro step angle test. 4 conclusions a. The microstep drive can significantly improve the stability of the angular velocity of the stepping motor in the low speed running zone. There is no significant effect on the stability of the angular velocity of the high speed running domain. b. The uniformity of the low-speed operation of the microstepping drive system is mainly determined by the uniformity of the microstep angle. For a four-phase (two-phase) motor, it is important to reduce the influence of the fourth harmonic torque. c. A new method for determining the micro-step angle variation law and the micro-step angle error using the angular velocity curve is given.
800 Puffs Vape,Electronic Smoke,Puff Bar Electronic Cigarette,Pure Smoke Electronic Cigarette
Guangzhou Yunge Tianhong Electronic Technology Co., Ltd , https://www.e-cigaretteyfactory.com