The stepper motor is a special motor used for control. Its rotation is operated step by step at a fixed angle (called "step angle"), which is characterized by no accumulation error (accuracy of 100%). Therefore, it is widely used in various open loop control. The operation of the stepping motor is driven by an electronic device. This device is a stepping motor driver. It converts the pulse signal from the control system into the angular displacement of the stepping motor, or: every pulse signal sent by the control system. The stepper motor is rotated by one step angle by the driver. Therefore, the speed of the stepper motor is proportional to the frequency of the pulse signal. Although stepper motors have been widely used, stepper motors are not as conventional DC motors, and AC motors are used under normal conditions. It must be composed of a dual ring pulse signal, a power drive circuit, etc. to form a control system. Therefore, the use of stepper motors is not an easy task. It involves many professional knowledge such as machinery, motors, electronics and computers.
This paper mainly introduces the selection principle of stepping motor and the misunderstanding of selection. Firstly, it introduces the principle of selection. Secondly, it introduces the selection factors and selection steps of stepping motor. Finally, it explains the error of stepping motor selection. Follow the small series to find out in detail.
1. First determine the torque required by the stepper motor to drag the load. The easiest way is to add a lever to the load shaft and pull the lever with a spring balance. The tension multiplied by the arm length is both the load moment. Or theoretically calculated based on load characteristics. Since the stepping motor is a control type motor, the maximum torque of the commonly used stepping motor does not exceed 45Nm. The larger the torque, the higher the cost. If the motor torque you choose is larger or exceeds this range, you can consider adding a reduction gear.
2. Determine the maximum operating speed of the stepper motor. The speed index is very important in the selection of the stepping motor. The characteristic of the stepping motor is that as the motor speed increases, the torque decreases. The speed of the step is related to many parameters, such as: the driving voltage of the driver and the phase current of the motor. The phase inductance of the motor, the size of the motor, etc., the general rule is: the higher the driving voltage, the slower the torque drop; the larger the phase current of the motor, the slower the torque drop. When designing the solution, the speed of the motor should be controlled at 1500 rpm or 1000 rpm. Of course, this is not standardized. Refer to <Motor-Frequency Characteristics>.
3. According to the two important indexes of load maximum torque and maximum speed, and then refer to <moment-frequency characteristics>, you can choose the stepper motor that suits you. If you think that the motor you selected is too large, you can consider adding a speed reducer, which can save costs and make your design more flexible. To choose the right reduction ratio, we must consider the relationship between torque and speed and choose the best solution.
4. Finally, we must consider leaving a certain amount (such as 30%) of the torque margin and the speed margin.
5, try to choose a hybrid stepper motor, its performance is higher than the reflective stepper motor.
6. Try to select the subdivision driver and make the drive work in the subdivision state.
7. When selecting and not going into the misunderstanding of only one indicator of motor torque, that is to say, the greater the torque of the motor, the better, and should be considered together with the speed index.
8. In the case of high speed requirements, you can select a drive with a higher drive voltage.
9. Whether it is two-phase or three-phase when purchasing, there is no specific requirement, as long as the step angle can meet the requirements of use.

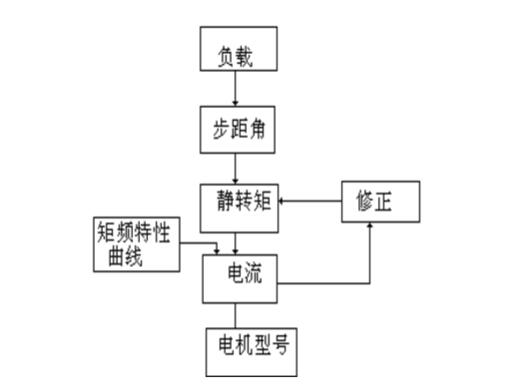
1, the choice of step angle
The step angle of the motor depends on the accuracy of the load. The minimum resolution (equivalent) of the load is converted to the motor shaft, and the angle of each equivalent motor should be taken (including deceleration). The step angle of the motor should be equal to or less than this angle. At present, the step angle of stepping motors on the market generally has 0.36 degrees/0.72 degrees (five-phase motors), 0.9 degrees/1.8 degrees (two-phase and four-phase motors), and 1.5 degrees/three degrees (three-phase motors).
2, the choice of static torque
The dynamic torque of the stepper motor is difficult to determine at once. We often determine the static torque of the motor first. The static torque selection is based on the load on which the motor operates, and the load can be divided into two types: inertial load and friction load. A single inertia load and a single friction load are not present. When starting directly (generally by low speed), both loads should be considered. When starting acceleration, the inertia load is mainly considered. For constant speed operation, only the friction load should be considered. Under normal circumstances, the static torque should be 2-3 times of the friction load. Once the static torque is selected, the base and length of the motor can be determined (geometric size).
3, the choice of current
Motors with the same static torque have different operating characteristics due to different current parameters. The current of the motor (reference drive power and drive voltage) can be judged according to the torque frequency characteristic curve.
In summary, the following steps should be taken to select the motor:
4, torque and power conversion
The input motor is generally used in a wide range of speed regulation, and its power is varied. Generally, it is only measured by torque. The torque and power are converted as follows:
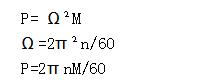
P is the unit of power in watts, Ω is the angular velocity per second, the unit is radians, n is the speed per minute, and M is the unit of torque for Newton·meter P=2πfM/400 (half-step operation) where f is the number of pulses per second ( Referred to as PPS)
Stepper motor selection steps1, the choice of stepper motor torque
The holding torque of the stepper motor is similar to what the conventional motor calls "power." Of course, there are essential differences. The physical structure of the stepper motor is completely different from AC and DC motors, and the output power of the motor is variable. Which type of motor is usually selected based on the required torque level (ie the amount of torque required to carry the animal). Generally speaking, the torque is below 0.8Nm, and 20, 28, 35, 39, 42 (the diameter or square of the motor body, unit: mm) is selected; the torque is about 1N.m, and the 57 motor is more suitable. Torque force in several Nm or larger cases, it is necessary to select 86, 110, 130 and other specifications of the stepper motor.
2, step by step motor speed selection
Special consideration should also be given to the speed of the motor. Because the output torque of the motor is inversely proportional to the speed. That is to say, the stepping motor has a low speed (a few hundred revolutions per minute or less, and its output torque is large), and the torque in the high-speed rotation state (1000 rpm - 9000 rpm) is small. Of course, in some working conditions, high-speed motors are required. It is necessary to measure the coil resistance and inductance of the stepping motor. A motor with a slightly smaller inductance can be selected as a high-speed motor to obtain a larger output torque. On the contrary, in the case of low speed and large torque, it is necessary to select the inductance at ten or tens of mH, and the resistance should be larger.
3. Selection of no-load starting frequency of stepping motor
Stepper motor no-load starting frequency, usually called "empty frequency". This is an important indicator for purchasing a motor. If it is required to start and stop frequently in an instant, and the rotation speed is around 1000 rpm (or higher), "accelerated start" is usually required. If you need to start directly to achieve high speed operation, it is best to choose a reactive or permanent magnet motor. The "vacuum frequency" of these motors is relatively high.
4, the number of phase selection of stepper motor
The choice of the number of phases of the stepper motor, this content, many customers have little attention, most of them are purchased casually. In fact, different phases of the motor, the work effect is different. The more the number of phases, the smaller the step angle can be, and the vibration at work is relatively small. In most cases, there are more two-phase motors. In the high-speed and high-torque working environment, it is more practical to select a three-phase stepping motor.
5, for the stepper motor use environment to choose
Special stepper motors are waterproof and oil resistant for use in special applications. For example, underwater robots require a water discharge motor. For special-purpose motors, it is necessary to select them.
6. Can you need special specifications according to your actual situation?
For special specifications of stepper motors, please communicate with us and order them within the scope permitted by the technology. For example, the diameter, length, and extension direction of the shaft.
7. If necessary, it is best to communicate and confirm the model with the technical engineer of the manufacturer.
If necessary, it is best to further communicate with the technical engineers of the manufacturer to confirm whether the stepper machine you want to select can meet all the requirements of your requirements.

1. Two-phase stepping motor, three-phase stepping motor and two-phase electric 220 volts, three-phase electric 380 volts misunderstanding
According to the internal structure, the stepping motor can be divided into two-phase stepping motor, three-phase stepping motor and five-phase stepping motor. Since the cost of five-phase stepping motor is high, it is rare in the market, so the two phases are commonly used. Stepper motor and three-phase stepper motor. Many customers just touch the step, often mistakenly believe that the two-phase stepper motor is 220 volt power supply, three-phase stepper motor is 380 volt power supply, in fact, is wrong. We say that the two-phase three-phase stepper motor is distinguished according to the internal logarithm of the stepper motor, and has nothing to do with the 220 volt 380 volt power supply.
2. Misunderstanding between stepping motor power and torque
Stepper motors are generally used in a wide range of speeds, usually measured by torque, and the faster the speed, the smaller the torque will be, and the power will vary, so the stepper motor has no power. Moments, some customers want to replace a conventional motor, and want to choose a motor with about the same power as before. Here is an approximate formula.
The torque and power are converted as follows:
∵P=Ω.M
Ω=2П.n/60
∴P=2П.nM/60, ≈nM/10 Power ≈Speed*Torque/10
Where P is power, the unit is watt, Ω is angular velocity per second, the unit is radians, n is the speed per minute, and M is the moment, the unit is Nm.
3, the error of the stepper motor power supply
If the stepper motor is running normally, it must be used simultaneously with the stepper motor driver and the pulsed controller. The stepper motor does not need to be directly connected to the power supply. The stepper motor's outlet is directly connected to the driver. We usually call the power supply. Voltage refers to the power supply voltage to the driver. Many customers want to use 220V voltage to supply power directly, which is convenient and fast, but not all stepper motors can be realized. Generally, the three-phase high-power 110 stepping motor is equipped with the driver MA-3208. It can be directly powered by 220V, and the other low-power motor drivers are equipped with a switching power supply or transformer.
4, the wrong part of the stepper motor naming
At present, the naming methods of domestic stepping motors can be described as various. There is no unified national standard. Each manufacturer is named in its own way. Many customers directly ask if there is any type of stepping motor. If you want to find the same naming method. Motor replacement, only find the original manufacturer. In fact, the stepping motors of all manufacturers are the same, but the names are different. We only need to grasp the key parameters, the length of the flange, the torque, the length of the motor body, and the step angle to determine the motor that can be replaced.
5, the stepping motor between the basic step angle and the misunderstanding between the subdivision
The subdivision technology of the stepping motor is essentially an electronic damping technology. Its main purpose is to reduce or eliminate the low frequency vibration of the stepping motor. Improving the running accuracy of the motor is only an incidental function of the subdivision technology. The actual step angle at which the motor is running after subdivision is a fraction of the base step angle. (The basic step angle of the two-phase stepper motor is 1.8°, that is, one pulse goes 1.8°. If there is no subdivision, it is 200 pulses and one 360°. The subdivision is to accurately control the phase current of the motor through the driver. The generated, independent of the motor, if it is 10 subdivision, then send a pulse motor to go 0.18 °, that is, 2000 pulses to go 360 °, the accuracy of the motor can reach or close to 0.18 °, also depends on the subdivision driver Other factors such as subdivision current control accuracy, etc. The accuracy of subdivision drivers of different manufacturers may vary greatly; the larger the subdivision number, the more difficult it is to control. By analogy, the basic step angle of a three-phase stepper motor is 1.2°. That is, one pulse goes 1.2°. If there is no subdivision, it is 300 pulses and 360°. If it is 10 subdivision, it will send a pulse. The motor will go 0.12°, that is, 3000 pulses will go 360°. Analogy.
Industrial LCD Monitor / Computer
Industrial Touch Monitor which has strong waterproof ability, and fully meets the dustproof and waterproof standards. When it is installed in a control cabinet, it can prevent water droplets and water vapor from splashing into the site and avoid affecting the operation of the equipment. In addition, it also has excellent heat dissipation. Many industrial touch monitors are made of aluminum alloy, which is not only beautiful and texture, but also the heat dissipation performance of the product has been improved.
industrial all in one,industrial display,industrial lcd monitors,industrial computers,open frame monitors,touch screen monitor
Shenzhen Hengstar Technology Co., Ltd. , https://www.angeltondal.com