What is MEMS? MEMS (Micro Electro Mechanical Systems) is a cutting-edge technology based on micro/nano technology, a technology for designing, processing, manufacturing, measuring and controlling micro/nano materials. It integrates mechanical components, optical systems, drive components, and electronic control systems into a single unit micro system.
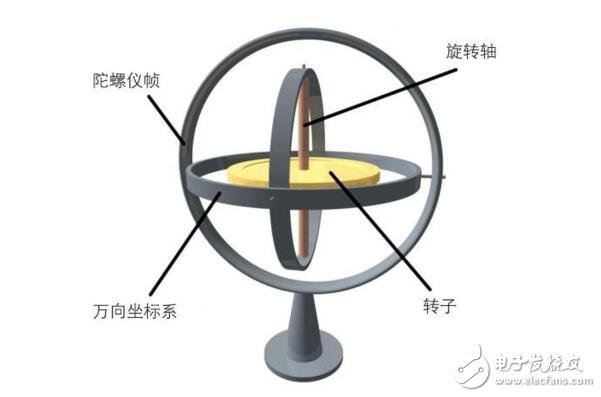
Compared to traditional gyroscopes that use the principle of conservation of angular momentum, MEMS gyroscopes use different operating principles. A conventional gyroscope is an object that rotates continuously, and the direction of its rotation axis does not change with the rotation of the holder that carries it. It is obviously more difficult to machine such a non-stop rotatable object that is continuously rotated on a silicon wafer substrate by micromechanical techniques. To this end, the MEMS gyroscope uses Coriolis force to realize the miniaturization of the device based on the characteristics of the conventional gyroscope.
The Coriolis force is also often referred to as the Coriolis force, the Coriolis force, which is the displacement of the mass point of the linear motion in the rotating system due to the linear motion of the inertia relative to the rotating system. The description comes from the inertia of the motion of the object. The biasing force acting on the moving mass of the earth due to the rotation of the earth is such a representative. The geostrophic force helps to explain some geographical phenomena, such as the side of the river The other side is washed even more.
The MEMS gyroscope is the most common application of Coriolis force. The MEMS gyroscope utilizes the Coriolis force (the tangential force that the rotating object receives when moving in the radial direction). The rotating gyroscope can be used for various forms. The linear motion produces a reflection, and the motion measurement and control can be performed by recording the Coriolis force received by the gyroscope component. In order to generate this force, MEMS gyroscopes are usually equipped with movable capacitor plates in two directions. "The radial capacitive plates plus the oscillating voltage force the object to move radially, and the lateral capacitive plates are measured due to the lateral Coriolis motion band. The change in capacitance comes." Thus, the "gyro object" in the MEMS gyroscope will continue to make radial movements or oscillations while driving, thus simulating the movement of the Coriolis force constantly changing back and forth in the lateral direction. And can make a slight shock in the lateral direction with a driving force difference of 90 °. This Coriolis force is like the angular velocity, so the angular velocity of the MEMS gyroscope can be calculated from the change in capacitance.
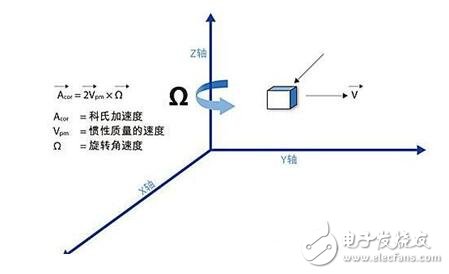
Triaxial angular velocity is proportional to the rate of rotation
Taking STMicroelectronics' MEMS gyroscope as an example, its core component is a micromachining mechanical unit that is designed to operate according to a tuning fork mechanism (the tuning fork mechanism works by a pair of piezoelectric crystals mounted on the tuning fork base). The tuning fork vibrates at a certain resonant frequency. When the tuning fork of the tuning fork switch comes into contact with the measured medium, the frequency and amplitude of the tuning fork will change. These changes of the tuning fork switch are detected by the intelligent circuit, processed and converted into a switching signal. ). The motor drive part is electrostatically driven to oscillate the mechanical element back and forth to generate resonance. The Coriolis force is used to convert the angular rate into a displacement of a specific induction structure, and the two moving mass points are continuously moved in opposite directions. As long as an angular rate is applied from the outside, a force occurs, the direction of the force being perpendicular to the direction of motion of the particle. The generated force causes the sensing mass to be displaced. The magnitude of the displacement is proportional to the magnitude of the applied acceleration. The sensor located next to it senses the change in capacitance caused between the stator and the rotor, thereby achieving the steering function. Moreover, since the advanced power-off function is embedded in the control circuit, the total power consumption of the gyroscope can be greatly reduced by turning off the entire sensor when the sensor function is not required, or allowing it to enter the deep sleep mode. Thus, portable devices such as mobile phones can achieve longer battery life.
Three-axis gyroscope technology principleA three-axis gyroscope is also called a "micro-mechanical gyroscope", and a "micro-mechanical gyroscope" can also be called a "MEMS gyroscope", that is, simultaneously measuring the position in six directions, moving the trajectory, and accelerating. A single axis can only measure the amount in one direction, that is, one system requires three gyroscopes, and one of the three axes can replace three single axes. The 3-axis has a small volume, light weight, simple structure and good reliability, and is a development trend of the laser gyro.
The biggest function of the three-axis gyroscope is to "measure the angular velocity to determine the motion state of the object, so it is also called the motion sensor". In other words, this thing allows our equipment to know where "where and where to go" (where they Are or where they are going)!
For example, the chip contains a miniature magnetic body, which can be displaced in the X, Y, and Z directions under the action of the Coriolis force generated during the rotary motion of the device. This principle can be used to measure the movement direction of the mobile phone. The other part of the chip core can be related to the conversion of the sensor data into a digital format that the device can recognize. Therefore, when the system is running, whether you move the device up or down, the chip inside accepts the command and sends it to the device. The CPU transmits data so that the device can respond correctly.
Acceleration sensor
Accelerometers are one of the basic measuring components of inertial navigation and inertial guidance systems. The accelerometer is essentially an oscillating system that is mounted inside the motion carrier and can be used to measure the motion acceleration of the carrier.
MEMS accelerometer working principle:
When the accelerometer is accelerated along with an external object (the acceleration of the object is the acceleration to be measured), the mass is moved in the opposite direction by the inertial force. The displacement of the mass is limited by the spring and the damper, and the external acceleration can be measured by the output voltage.
Smart Phone Holder For Car Vent
Smart Phone Holder For Car Vent,Air Vent Iphone Mount,Air Vent Phone Holder,Air Vent Cell Phone Pouch Holder
Ningbo Luke Automotive Supplies Ltd. , https://www.car-phone-holder.com